ROBO
IoT + kinetic design
Robo is an interdisciplinary concept that lives at the intersection of kinetic architecture and Internet of Things (IoT) technology.
IoT and kinetic architecture are both more than 50 years old and
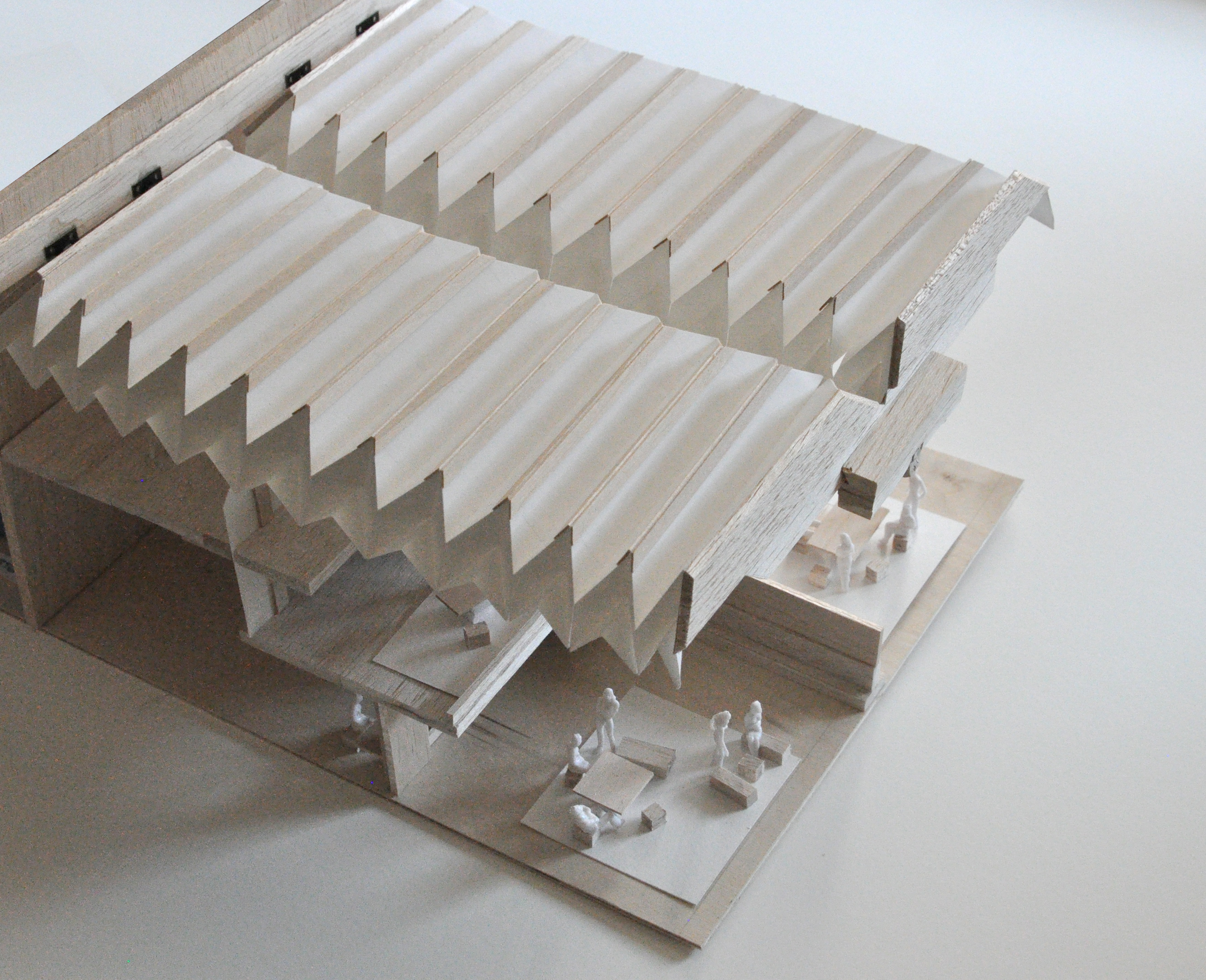
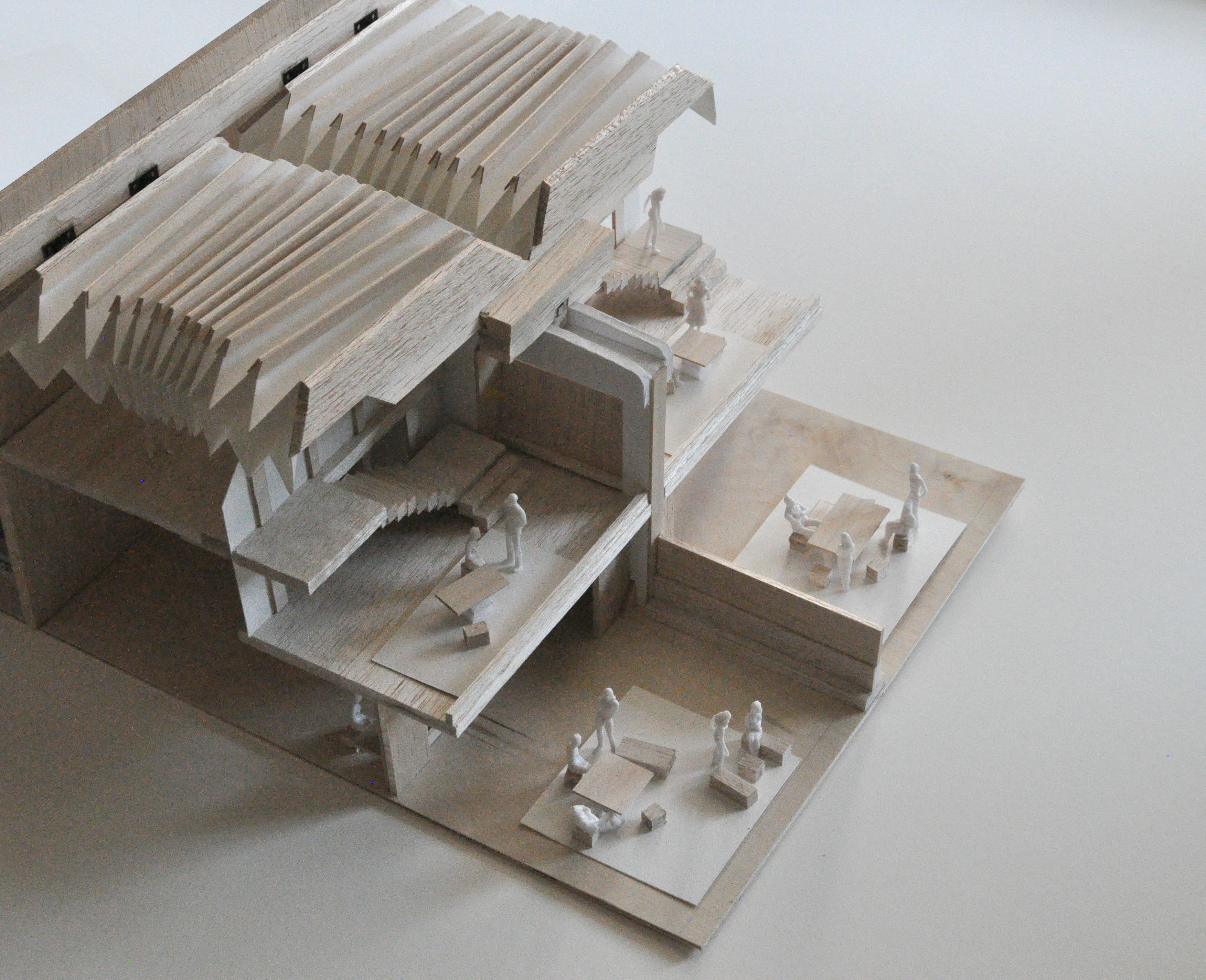
thinking in the context of kinetic architecture, it would be interesting to imagine the building components like platforms, walls, and roofs could move in an intelligent way.
Robo changes shape when sensing precipitations or detecting variations in natural light.

Here is a preview of Robo’s functionalities:
Inspired by herringbone tessellation origami, Robo expands and contracts to cover or expose the outdoor space.
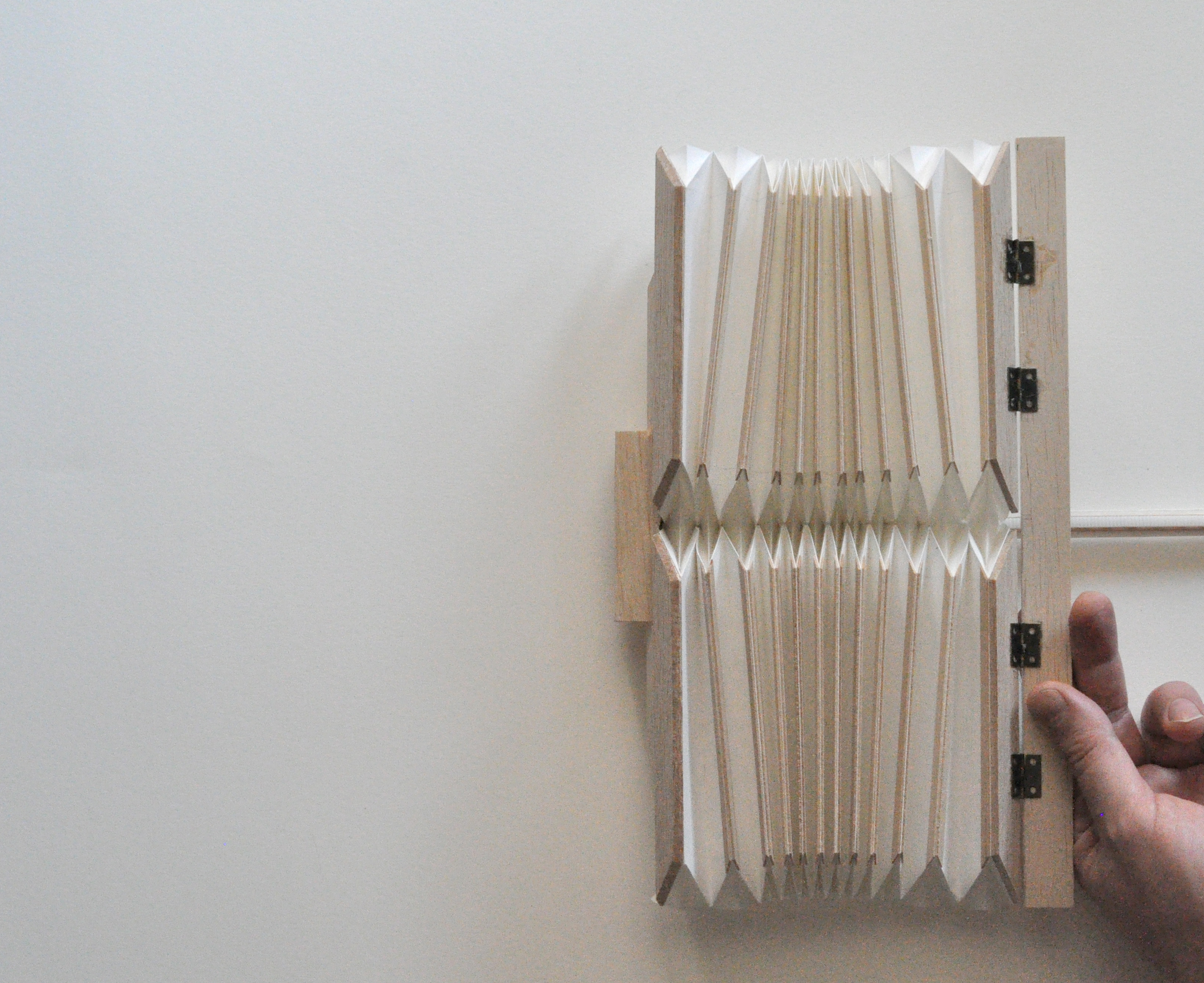
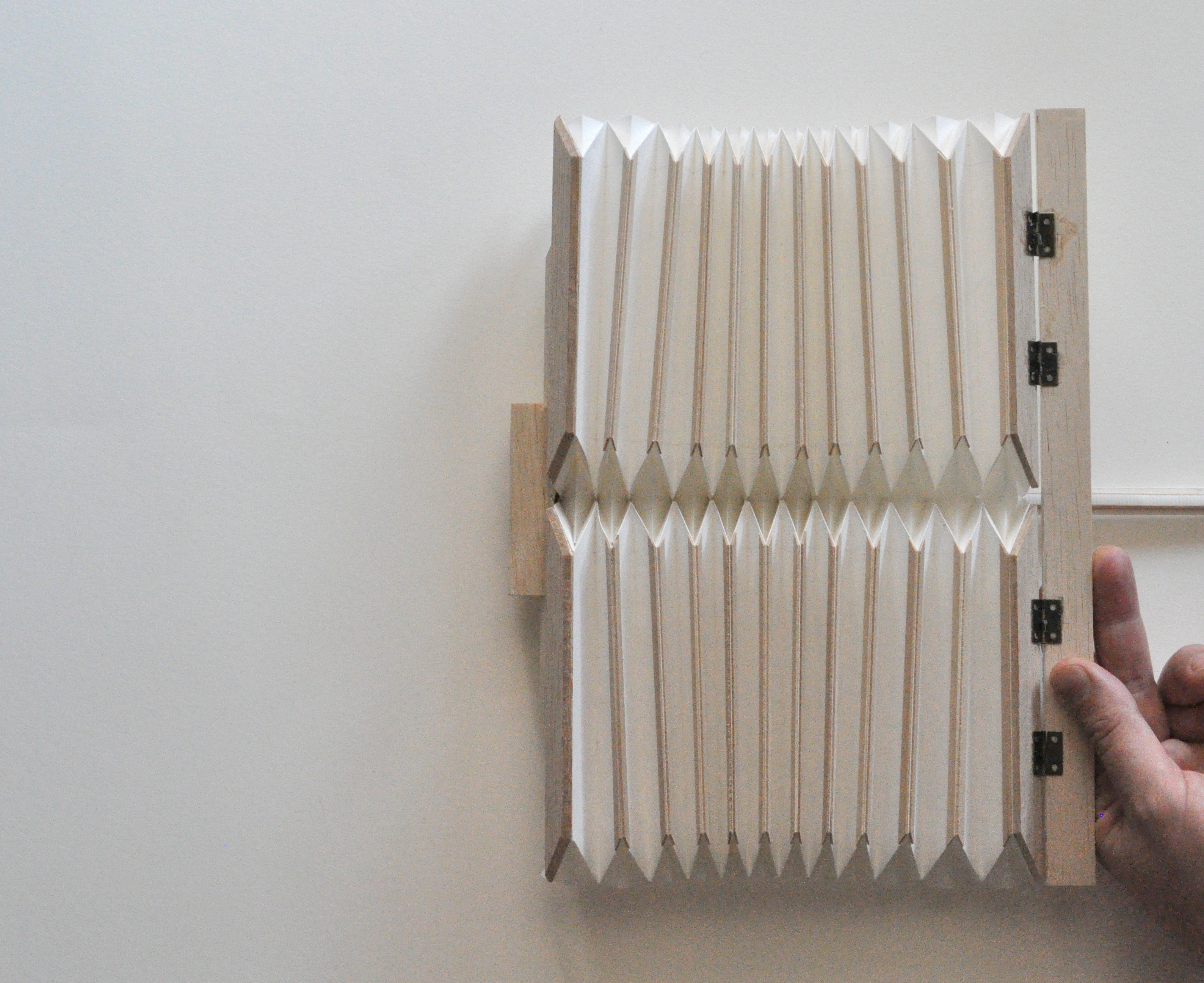


Robo has two modes of operation: automatic, and manual. When in manual mode, it follows the user’s commands by pushing either the open button or the close button. However, when in automatic mode, it moves in three different scenarios depending on the input from light and rain sensors.
1. At sunrise, it closes the canopy to let the sunlight rea ch the interior space.

2. At sunset, it opens the canopy and turns on the balcony lights
to create a cozy setting for an enjoyable evening hangout.

3. When it is rainy (or snowy), it opens the canopy

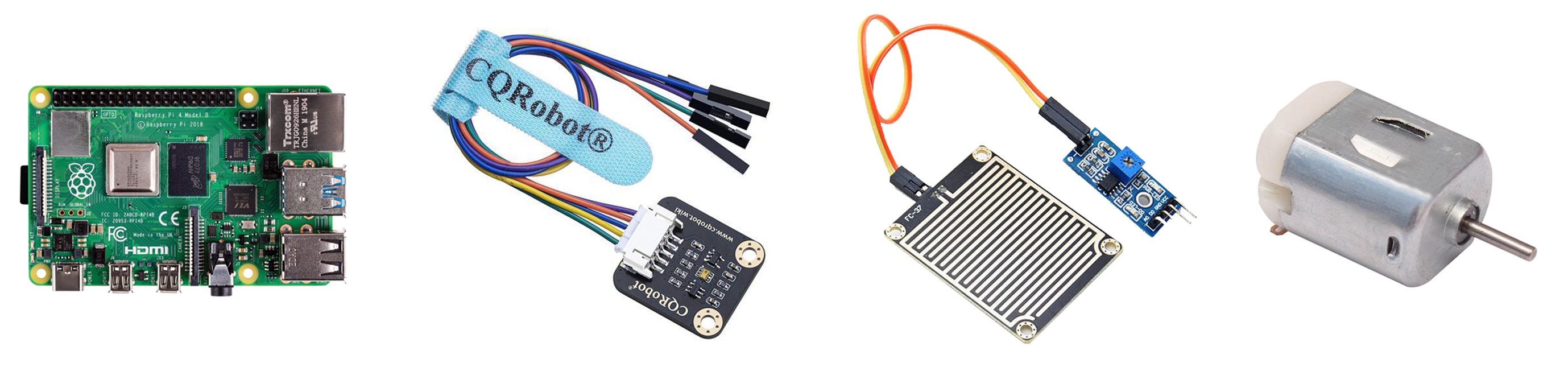
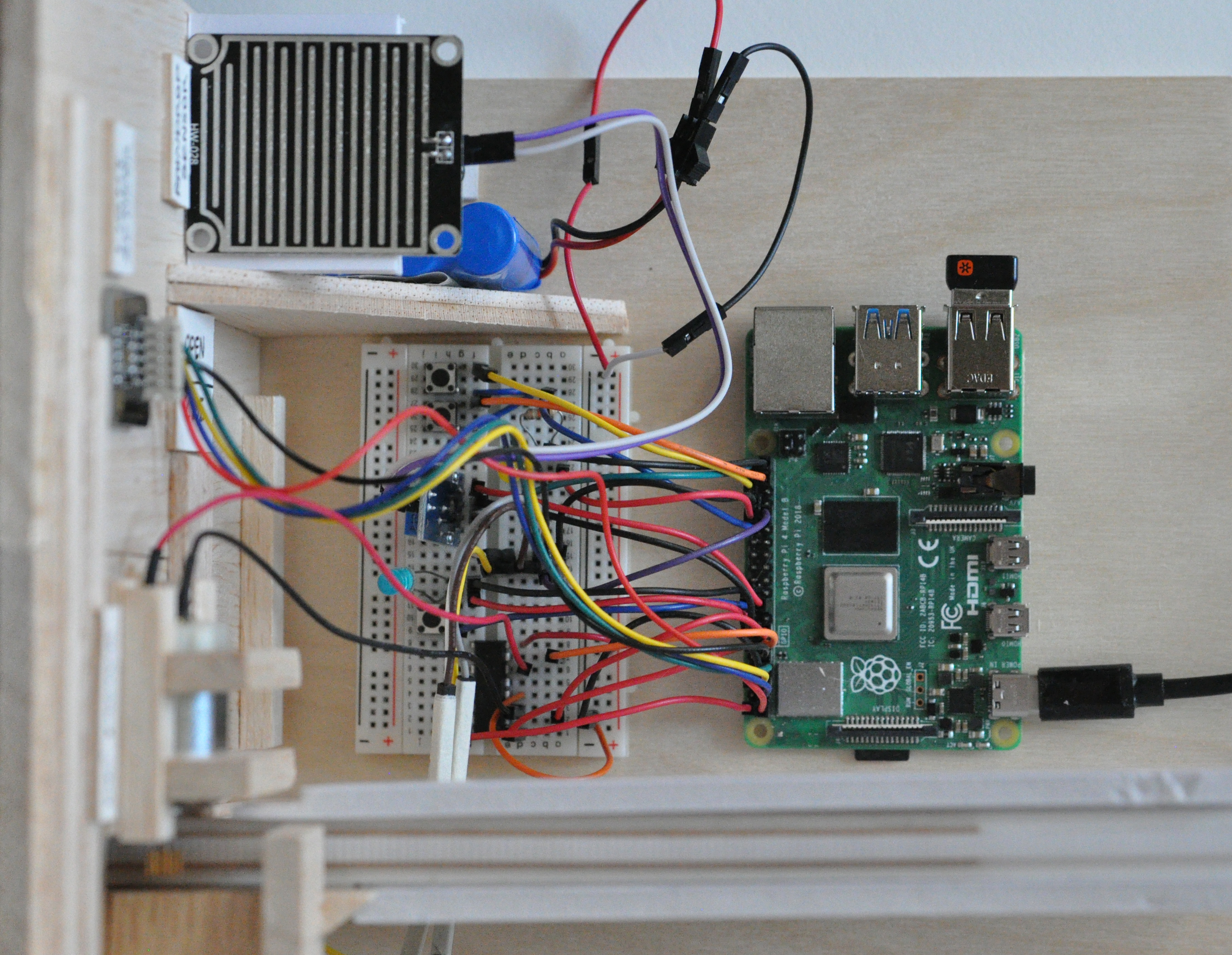
The step-by-step details on how to make a DIY 1/50 scale prototype of Robo using a Raspberry Pi and some Python programming can be found in this Medium Story. At the heart of Robo is a Microprocessor (e.g., Raspberry Pi) that gains intelligence through light and rain sensors and triggers the actuators to open or close the canopy. The sensors detect a change in environment in real time, and communicate it to the RPi. The Python code that is running on the RPi will make the decision on what the actuators need to do under each scenario. The system diagram below presents the relationship between these components.

The source code for Robo is available on my Github repo for your reference.
To read more about Robo check out this Medium Story.
![]()
Design and development:
Sima Shahverdi
To read more about Robo check out this Medium Story.

Design and development:
Sima Shahverdi